Si estás sentado en un barco en movimiento y lees un libro, la gente del barco piensa que estás quieto. Mientras que los que están en tierra creen que te mueves con el barco. ¿Por qué distintas personas llegan a conclusiones diferentes sobre el mismo hecho? La razón es que ven el mismo problema desde perspectivas diferentes: tú estás inmóvil con respecto al barco, pero para la tierra está en movimiento. Aquí el barco y el suelo son en realidad el marco de referencia. Antes de poder determinar si un objeto está en movimiento, hay que elegir un objeto como marco de referencia y, a continuación, estudiar su movimiento con respecto al marco de referencia. La elección del marco de referencia es arbitraria, pero debes elegir aquellos que te faciliten la investigación. El suelo es el marco de referencia más utilizado en mecánica clásica. Observar el mismo objeto en diferentes marcos de referencia llevará a conclusiones diferentes sobre el movimiento.
Para describir con precisión el movimiento de un objeto, también es necesario establecer un sistema de coordenadas en el sistema de referencia. La creación de sistemas de coordenadas es arbitraria, pero debes elegir aquellos que faciliten los cálculos. El sistema de coordenadas más utilizado es el sistema de coordenadas cartesianas. Este sistema utiliza tres ejes mutuamente perpendiculares para describir la posición: el eje X, el eje Y y el eje Z. Estos tres ejes se cruzan en un punto llamado origen cuya coordenada es (0,0,0).
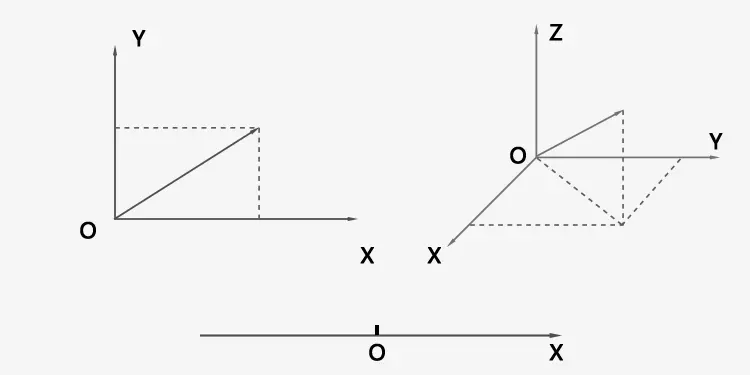
Si un objeto se mueve en una dimensión, es decir, a lo largo de una línea recta, se utiliza una recta numérica para expresar con precisión la posición del objeto. Por ejemplo, un coche que se desplaza por un tramo recto de autopista.
Si el objeto se mueve en dos dimensiones, es decir, en un plano, se necesita un sistema de coordenadas rectangulares para describir la posición del objeto. Por ejemplo, un barco que se desplaza por un lago.
Cuando el objeto se mueve en tres dimensiones, se necesita un sistema de coordenadas cartesianas tridimensional para describirlo. Por ejemplo, un avión volando en el aire.
Una vez establecido el sistema de coordenadas, se puede empezar a estudiar el movimiento con precisión. La posición es lo más sencillo y lo primero que se estudia. Se define como la ubicación de un objeto con respecto al origen del sistema de coordenadas. Suele representarse mediante un conjunto de coordenadas (x, y, z), es decir, un vector: la posición del objeto puede describirse mediante coordenadas a lo largo de cada eje.
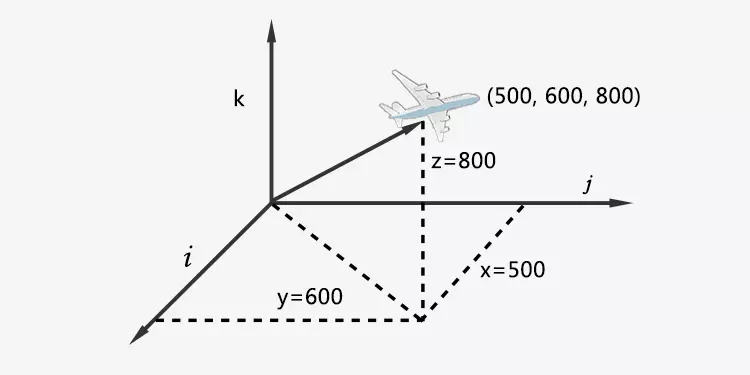
Por ejemplo, si tomamos la ciudad A como origen, el eje x apunta al este, el eje y apunta al norte y el eje z apunta verticalmente al cielo. Un avión se encuentra a 500 km al este de la ciudad, a 600 km al norte y a 800 m de altitud. Sus coordenadas son (500, 600, 800).